
選択できるのは25トピックまでです。
トピックは、先頭が英数字で、英数字とダッシュ('-')を使用した35文字以内のものにしてください。
5.5 KiB
5.5 KiB
电机控制方案书
一、项目背景
电机控制是运动控制的基础,本项目需要熟悉运动控制相关的指令和自制一个控制软件,控制电机的运行。首先需要熟悉电机控制的相关指令,能够通过XDPPro来调试电机,并且能够绘制梯形图来制作PLC程序控制电机运行。然后需要自制一个控制软件,通过设置相关的参数来控制电机运行。
二、项目需求
2.1 需要学习的运动控制指令
- 学习了解项目相关的H运动的运动控制指令
- 学习了解项目相关的C运动的运动控制指令
2.2 需要实现的电机运动控制
- 控制电机的启动
- 控制电机的停止
- 控制电机的暂停
- 控制电机的继续
2.3 需要了解的其他知识点
2.3.1 电机参数
- 设置电机的运行的相关参数
2.3.2 电机运动
电机运动包括电机使能;电机的点动、相对运动、绝对运动、多段运动;电机的停止运动;电机的继续运动。
2.3 项目开发环境
QT、Window10、c++、XDPPro
三、项目具体设计
我实现的是电机在C运动模式下的相关运动控制,因此PLC程序中使用的都是C运动相关的控制指令,在自制程序中需要去设置的参数都是我通过对XDPPro中C运动模式下的轴调试的学习后了解到的。
3.1 PLC程序设计
3.2 自制软件设计
3.2.1 整体流程图
首先是整体的流程图,如下:

首先进行通信的连接,然后就可以进行参数的配置;配置完参数之后就可以给电机使能信号;给了使能信号之后就可以对相关的数据和连接状态进行监控;之后就能对电机进行相关的运动控制操作;最后是判断程序是否结束。
3.2.1.1 通信连接
本项目的通信连接主要通过Xnet的通信方式,流程图如下:
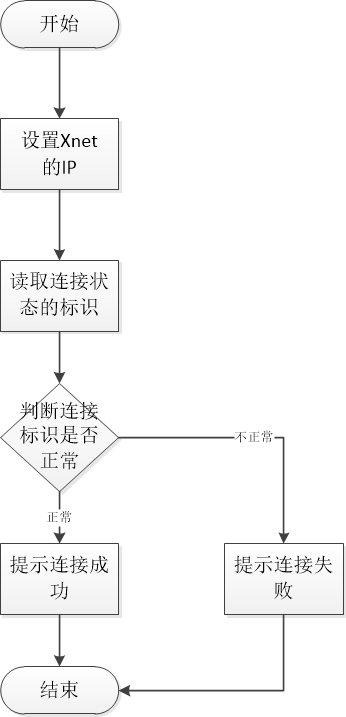
首先设置Xnet服务的IP地址,然后就可以通过函数读取连接状态标识,读取成功之后就可以判断标识是否正常;正常的话就提示连接成功;不正常的话就提示连接失败。
3.2.1.2 参数配置
参数配置模块包括两部分,首先是参数下载,在上位机程序中输入相应的参数,然后下载到PLC中。然后是参数上传,通过Xnet通信协议的函数将PLC中对应的参数读取写入到上位机程序界面上对应的表格中。
1.参数下载
首先是整体的流程图,如下:
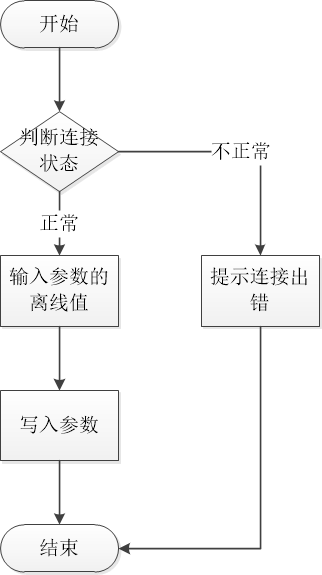
首先先判断连接状态,如果状态不正常则提示连接出错;如果正常则用户可以在界面上输入参数的离线值,然后写入参数。
输入参数的离线值模块的流程图:

输入对应的参数
写入参数模块的流程图:
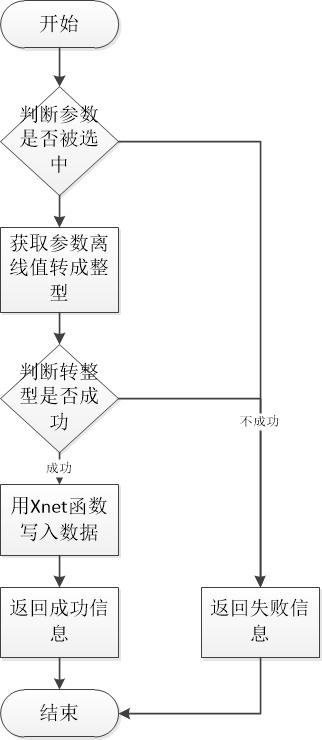
首先判断参数是否被选中,如果成功则获取它的离线值并转换成整型;然后判断转换成整型是否成功;如果没有选中或者转换成整型失败都返回失败信息;成功的话就用Xnet函数写入数据,返回成功信息。
2.参数上传
参数上传模块的流程图如下:

首先用Xnet函数读取所需要的参数,然后将对应参数写到界面中对应的位置。
3.2.1.3 数据和状态监控
1.连接状态监控
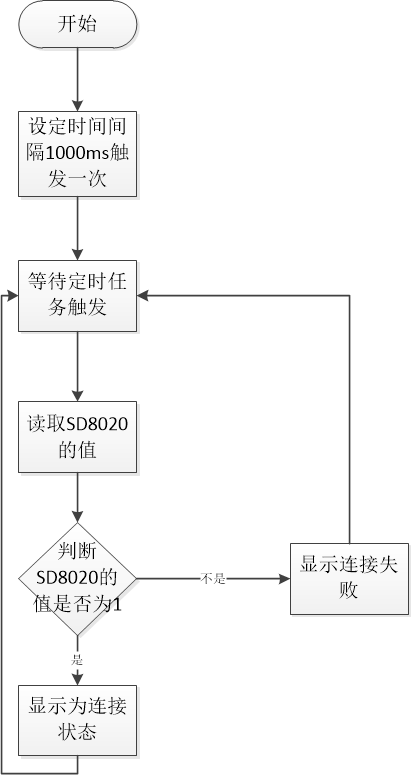
首先要设定读值的时间间隔,因为XDH的同步单元周期我们基本默认是1000ms,因此我这里的时间间隔也设置为1000ms。到时间触发任务,读取SD8020的值,然后判断是否为1,如果为1的话就说明连接成功,不为1则连接失败。
2.从站状态监控
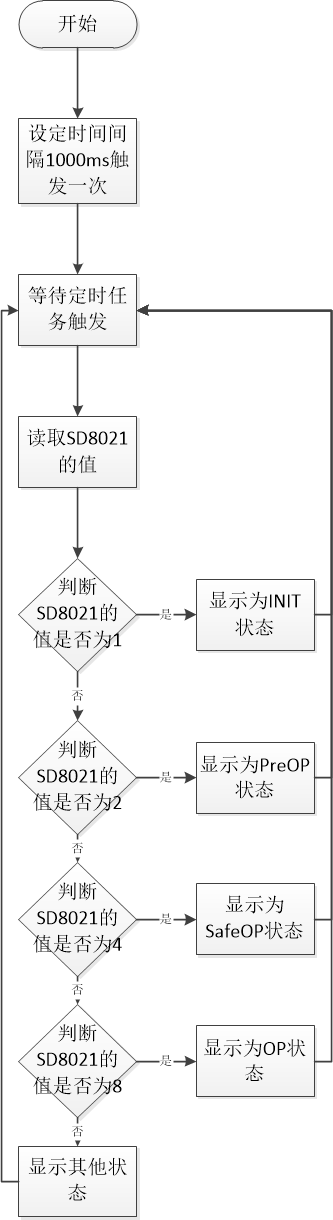
这是依据EtherCAT通信协议设置的从站状态监控,因为本项目PLC和伺服已经电机之间采用的是EtherCAT通信。时间间隔同样是1000ms,读取SD8021的值,根据SD8021的值去判断从站的状态。
3.数据监控
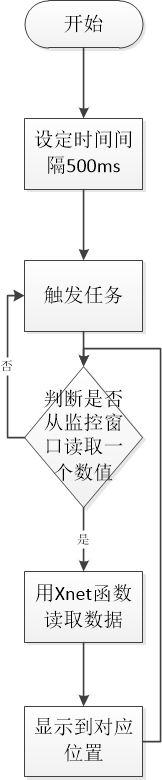
数据监控和之前的连接和从站状态监控差不多,区别是时间间隔缩短到500ms,这样可以提高数据的精确度和准确性。
3.2.1.4 运动控制
1.点动
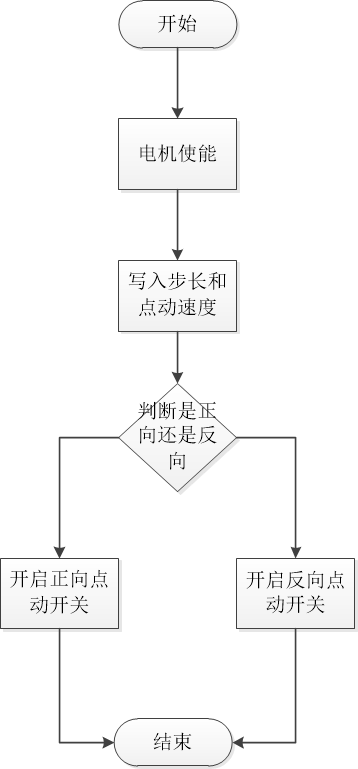
在电机使能之后,写入你需要的参数,然后选择正向点动还是反向点动
2.相对运动

首先开启电机使能,然后写入对应参数开启运动即可
3.绝对运动

首先开启电机使能,然后写入对应参数开启运动即可
4.多段运动

首先开启电机使能,然后写入对应参数开启运动即可
5.停止运动

停止运动只需开启M15线圈即可
6.继续运动
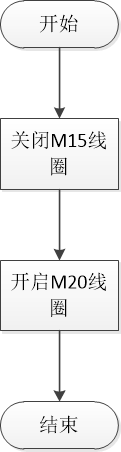
继续运动需要关闭M15线圈,然后开启M20线圈即可